ARM 어셈블리 #14 - 복귀주소를 자동 저장하는 BL 명령어 활용
BL 명령은 이전 포스팅에서 설명한 B 명령에 함수 호출 기능을 더한 명령어입니다.
B 명령이 단순히 특정 레이블로 점프하는 역할이었다면, BL 명령은 점프 이후 복귀해야 하는 주소를 LR(Register R14)에 자동으로 저장합니다.
따라서 BL은 ARM에서 함수 호출을 구현하는 핵심 매커니즘이며, 스택, 함수 호출 규약, 프레임 포인터 등 이후에 배우게 될 개념들의 기반이 됩니다.

복귀주소 저장의 필요성
함수를 호출하면 함수 바디가 끝난 뒤 원래 호출 지점으로 되돌아와야 합니다. 이 복귀 주소를 모르면 다음에 실행해야 할 명령어가 어디인지 알 수 없기 때문에, 별도로 저장해둘 필요가 있습니다.
BL 명령
bl label
문법은 b label과 동일하지만 내부 동작이 다릅니다.
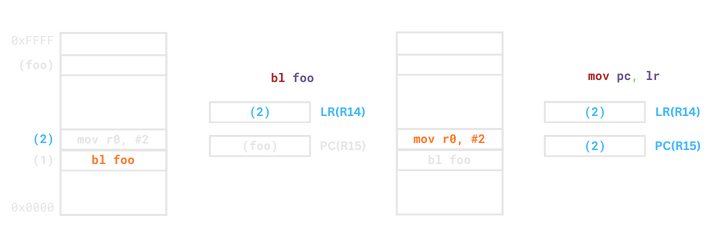
bl label을 실행하면 label 위치로 점프하면서, 해당 BL 다음 명령어의 주소(복귀 주소)를 LR에 저장합니다.
이후 서브루틴 코드가 끝나면 LR에 저장된 주소를 PC로 로드하여 원래 실행 흐름으로 돌아갑니다.
LR(Link Register) 레지스터
ARM은 함수 호출을 구현하기 위해 LR을 복귀 주소를 저장하는 전용 레지스터로 사용합니다.
ARMv4에서는 R14가 LR로 사용됩니다.
bl foo
mov r0, #2 @ LR이 저장한 명령어 위치
서브루틴이 끝나면 LR에 저장된 주소로 복귀해야 하므로, PC를 LR 값으로 업데이트합니다.
mov pc, lr
ARMv4에는 아직
bx명령이 없기 때문에,mov pc, lr형태로 직접 복귀합니다. ARMv5 이후부터는bx lr이 일반적으로 사용됩니다.
예제 코드
.text
.global _start
_start:
mov r0, #2
bl foo
mov r1, r0
b .
foo:
add r0, r0, #3
mov pc, lr
실행 흐름
mov r0, #2→ R0 = 2bl foo→ PC = foo, LR =mov r1, r0의 주소add r0, r0, #3→ R0 = 5mov pc, lr→ PC가mov r1, r0로 점프mov r1, r0실행
이 예제는 서브루틴 foo에서 R0에 3을 더한 후, 그 값을 R1에 저장하는 간단한 흐름입니다.
만약 mov pc, lr이 없다면 R1에 결과값이 저장되지 못하고 프로그램 흐름이 중단됩니다.
디버깅
(gdb) target remote :1234
(gdb) display/i $pc
(gdb) display/i $lr
bl foo 직후의 PC와 LR 값을 비교하면 BL 명령이 다음 명령어 주소를 LR에 저장한다는 점을 명확히 확인할 수 있습니다.
특히 LR 값이 mov r1, r0의 주소와 일치하는지 확인하면 BL의 동작을 직관적으로 이해할 수 있습니다.
마무리
다음 포스팅에서는 조건부 명령어 실행을 위한 condition code에 대해 알아보겠습니다. 지금까지는 모든 명령어가 항상 실행되었지만, ARM 명령어는 뒤에 두 글자의 조건 코드를 붙여 특정 조건에서만 실행되도록 만들 수 있습니다.