ARM Assembly #5 - A Complete Guide to Shifter Operands
In this post, we’ll take a complete look at Shifter Operands used in ARM’s Data Processing Instructions. Shifter operands are not optional—they are fundamental components of all data processing instructions.
We’ll focus on three key aspects:
- Types and syntax of shifter operands
- How immediate values are encoded and what limitations they have
- Why ARM supports shifter operands at all
How Shifter Operands Are Used
Instructions like mov, add, and sub always use at least one shifter operand.
A typical data processing instruction includes:
- Destination register (
Rd) - Input register (
Rn) - Shifter operand (
Shifter Operand)
shifter_operand and may combine it with Rn to produce a result in Rd, or simply update condition flags.
Instruction Format
- Unary instructions (
mov,mvn):
<instruction> <Rd>, <Shifter Operand>
- Binary instructions (
add,sub,and, etc.):
<instruction> <Rd>, <Rn>, <Shifter Operand>
In other words:
movandmvnstore the shifter operand’s value (or its bitwise negation) intoRd- Other instructions compute
Rn op ShifterOperand, storing the result inRd
Types of Shifter Operands
Shifter operands can take one of the following forms:
- Immediate constant
#<immediate>
- Register value
<Rm>
- Shifted register
- Logical shift left:
<Rm>, lsl #<shift_imm>or<Rm>, lsl <Rs> - Logical shift right:
<Rm>, lsr #<shift_imm>or<Rm>, lsr <Rs> - Arithmetic shift right:
<Rm>, asr #<shift_imm>or<Rm>, asr <Rs> - Rotate:
<Rm>, ror #<shift_imm>/<Rm>, ror <Rs>/<Rm>, rrx
- Logical shift left:
Here, <Rm> is the operand register used in the operation.
You can plug these into the <Shifter Operand> position in any data-processing instruction.
Example:
# mov r0, r1
<instruction> <Rd>, <Shifter Operand>
<instruction> <Rd>, <Rm>
mov r0 r1
# add r0, r1, r0, lsl #2
<instruction> <Rd>, <Rn>, <Shifter Operand>
<instruction> <Rd>, <Rn>, <Rm> lsl #<shift_imm>
add r0 r1 r0 #2
Valid and Invalid Syntax Examples
mov r0, r1 @ Valid (<Rd> = r0, <Rm> = r1)
mov r0, #0xff @ Valid (<Rd> = r0, <Shifter Operand> = 0xff)
mov r0, r0, lsl #2 @ Valid (<Rd> = r0, <Sfhiter Operand> = r0, lsl #2)
add r0, #1 @ Invalid (<Rd> = r0, missing <Rn>)
Immediate Value Limitations
When using an immediate (#
Example:
.text
.global _start
_start:
mov r0, #0x101
b .
This causes an error:
imm.s: Assembler messages:
imm.s:4: Error: invalid constant (101) after fixup
Immediate Value Encoding
Immediate values in shifter operands are encoded in 12 bits total:
- 8-bit constant (imm8)
- 4-bit rotation (rotate_imm)
Actual rotation is rotate_imm * 2 bits (even numbers only)
The final value is computed like this:
#<immediate> = #<imm8> ROR (2 * #<rotate_imm>)
That means you can only represent values that can be formed by rotating an 8-bit number.
Constraints:
- 0x00 <= imm8 <= 0xff
- 0 <= rotate_imm <= 15
- Effective rotation = 2 * rotate_imm
Example: Valid Immediate
mov r0, #0x104
0x104=0b0000_0000_0000_0000_0000_0001_0000_0100- Can’t be stored directly in 8 bits, but:
- If you rotate it left by 2 (== right by 30), the resulting 8-bit pattern(
0100_0001) is valid - Therefore,
imm8=0x41,rotate_imm=15→ valid encoding
Example: Invalid Immediate
mov r0, #0x101
0x101=0b0000_0000_0000_0000_0000_0001_0000_0001- No rotation of 8-bit values can produce this → invalid
What to Do with Unrepresentable Constants?
Use a literal pool.
literal-pool.s
.text
.global _start
_start:
ldr r0, =0x101 @ The assembler places 0x101 nearby and loads it
b .
Compile:
$ arm-none-eabi-gcc \
-Ttext=0x10000 \
-nostdlib \
literal-pool.s \
-o literal-pool.elf
Disassembled:
$ arm-none-eabi-objdump -D literal-pool.elf
00010000 <_start>:
10000: e51f0000 ldr r0, [pc, #-0] @ 10008 <_start+0x8>
We’ll explore literal pools in more detail in a future post.
Example in C: When Constants Can’t Be Encoded
invalid-imm.c
int main(void) {
int x = 0x101;
return x;
}
Compile:
$ arm-none-eabi-gcc -fomit-frame-pointer -nostdlib -S invalid-imm.c
Assembly output:
main:
sub sp, sp, #8
ldr r3, .L3
@...
.L3:
.word 257
The constant is stored in a literal pool and loaded with ldr.
Why Use This Encoding?
If ARM allowed 32-bit immediate constants in every instruction, the instruction size would need to increase to 64 bits. That would violate the compact RISC design of ARM.
Most common constants in real code are:
- Small values (0, 1, 255)
- Bitmasks (0xff00, 0x8000)
- Address offsets
These are often representable via rotate encoding. The result is compact, expressive, and efficient.
Why Do Shifter Operands Exist?
ARM instructions pass the second operand through a Barrel Shifter before going to the ALU.
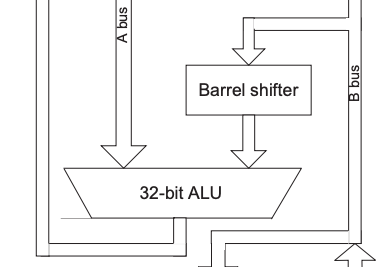
This hardware design allows:
- Fewer instructions
- Higher code density
- Better performance
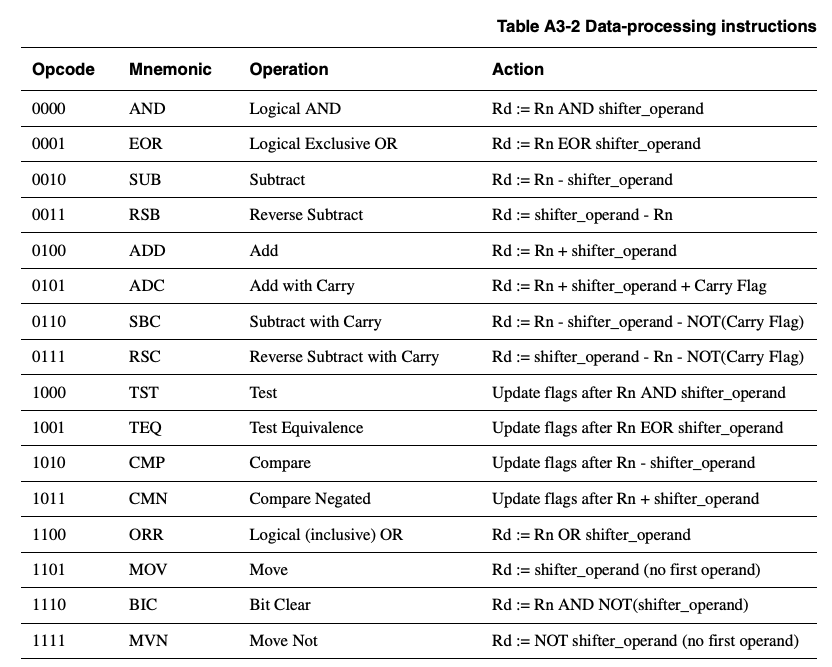
This concludes our deep dive into shifter operands in ARM assembly. Let me know in the comments if you want a breakdown of shift operation opcodes or internal instruction encoding!